Introductory note
For the past 20 years I have been working with science applied to art. Mainly with bio inspired robot swarms based on concepts like feedback, stigmergy and emergence. In this text I will mention briefly my own work, its implications and possible future developments. It is important to stress that my approach is artistic and not scientific. Hence, this is an artist’s statement and not an academic paper.
Key words: art robots; stigmergy; self-organization; feedback; 3D; architecture
A new kind of art
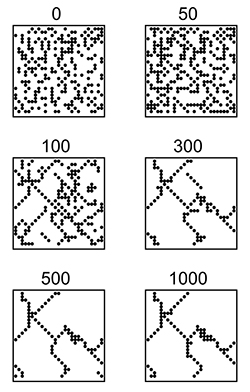
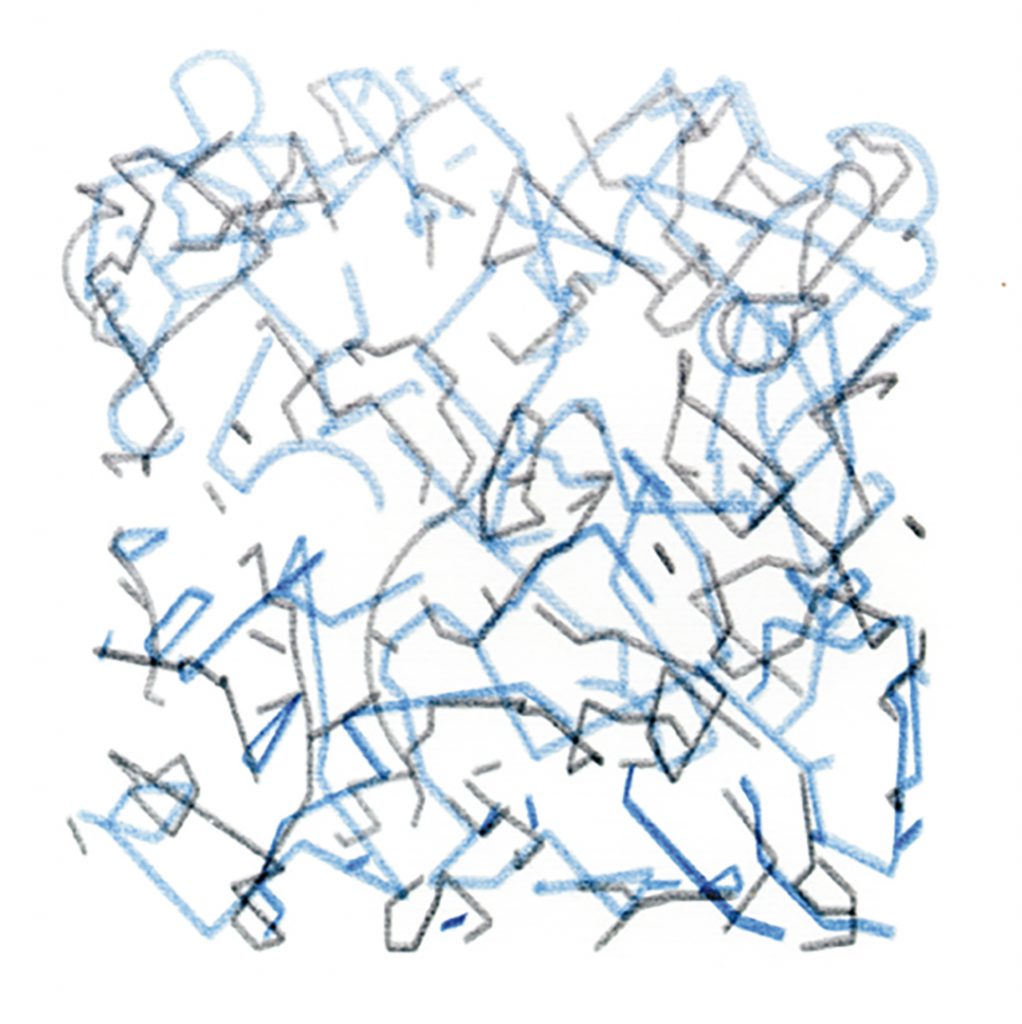
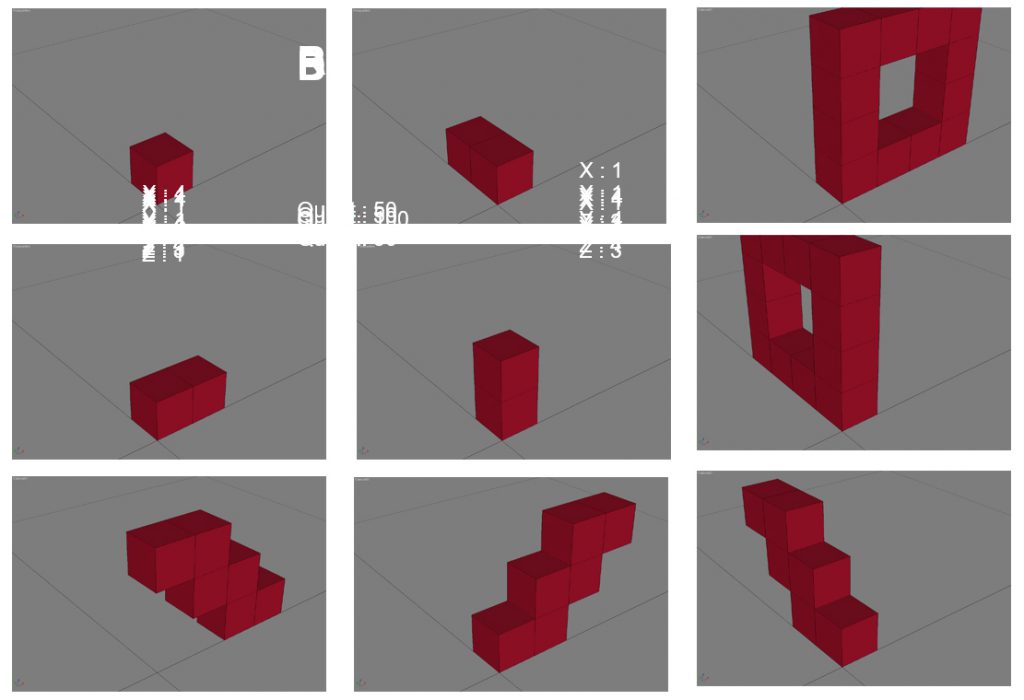
By the end of the nineties of last century I came across Marco Dorigo’s “ant algorithm” (Fig.1). Being an artist, beyond the perplexing dot iterations, I saw a drawing in the making. In 2001 I did some experiments in the computer generating drawings (Fig. 2) and 3D structures (Fig. 3). Nevertheless, I was not happy since the output was virtual and need manual “translation” to physical. Robotics appeared as a good solution to gain autonomy in drawing and painting generation.
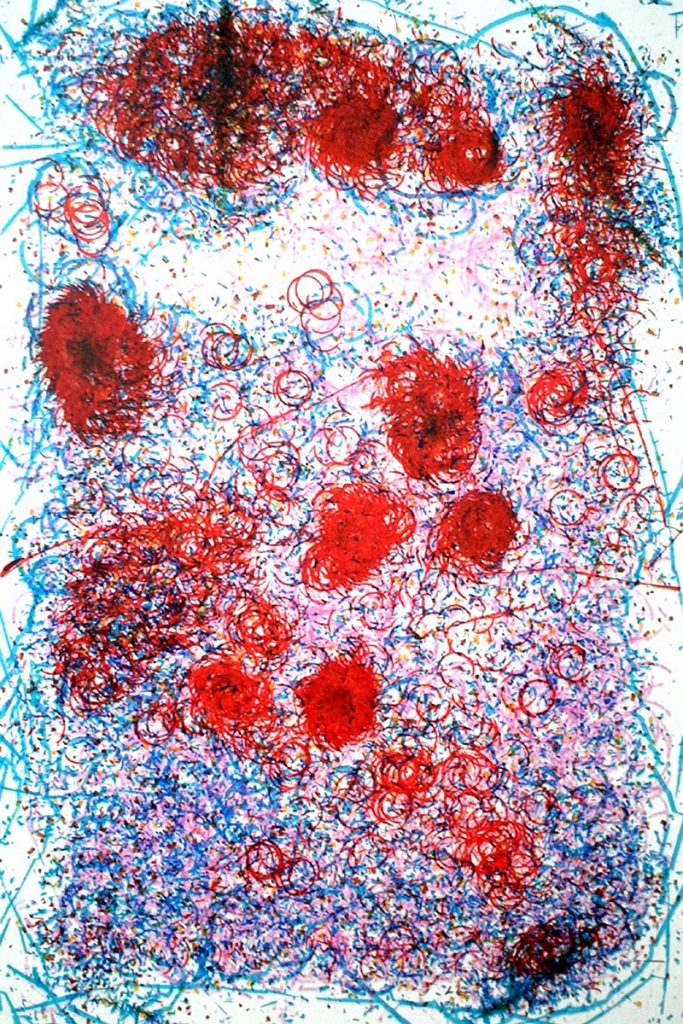
Artsbots (Art Swarm Robots), created in 2003, look like a swarm of motorized ants (Fig. 4). In this project, a swarm of small robots were involved in the creation of unique paintings, based on bio-inspired multi-agent interaction (Moura & Pereira, 2004). Each robot reacted in a stigmergic fashion to previous inputs, which were color marks left by another robot. The results of the project are paintings with distinct patterns which, at the level of perception, simulate a compositional attempt (Fig. 5). Swarm paintings demonstrate the possibility to develop a new kind of art based on artificial creativity, were the human is a triggering device in an emergent and out-of-control process. Instead of being previously uploaded, the main information for reactive and stigmergic behavior is gathered by each robot itself. In this case, constraints are given by the arena space, detected by the robots through the use of obstacle sensors, and parameter thresholds for color evaluation with RGB sensors.

Creativity emerges in the set of robots as a consequence of self-organization, driven by their interaction with the environment. Actually, the random walk of each robot is only interrupted by the “appeal” of a certain color spot, trace or patch that was previously left in the canvas by another robot. Given that the robot only ‘sees’ a limited region of the canvas, if no color is detected in that region, it follows its way, putting down a mark of its passage only in the case that its random number generator produces a value that exceeds a given threshold. In statistics language, each one of the outcomes of the experiment is regarded as the realization of a Random Function (RF), i.e., as a Regionalized Variable (RV). The RF is defined as the infinite set of dependent random variables Z(u), one for each location u in a certain area A. In this case, the area A is canvas, and the random variable is discrete, taking only three nominal color values – “Warm”, “Cold” and “White”. The underlying feedback process leads to the spatial dependency of the random variables and explains why clusters are usually formed in most of the RF instances. These instances are the mapping of the RV onto the canvas, depicting its hybrid structural/random constitutive fundamental nature.
The collective behavior of the set of robots evolving in a canvas (the terrarium that limits the space of the experience), is governed by the gradual increase of the deviation-amplifying feedback mechanism, and the progressive decrease of the random action, until the latter is practically completely eliminated. During the process the robots show an evident behavior change as the result of the “appeal” of color, triggering a kind of excitement not observed during the initial phase characterized by the random walk.
This is due to the stigmergy interaction between the robots, where one robot in fact reacts to what other robots have done. According to Grassé (1959), stigmergy is the production of certain behaviors in agents as a consequence of the effects produced in the local environment by a previous action of other agents.
Thus, the collective behavior of the robots is based on randomness, stigmergy and emergence.
Emergence
Central in recent studies, from Steven Johnson “Emergence” (2001) to Manuel DeLanda “Philosophy and Simulation (2011), just to mention two seminar books a decade apart, the concept is still rather difficult to grasp. In short, it shows how complex systems and patterns appear from simple rules and interactions. Common to physics and biology the concept is also applied to artificial intelligence and robotics. Consider, for example, swarm behavior, in which multiple agents interacting with each other and the environment, in a rather haphazard way, may generate order. What it is less clear is the way by which these mechanics can produce a novel behavior independent from the set of rules and the intention of the human that implements and starts the process. Namely, it is difficult to determine when control becomes out of control [as Kevin Kelly explores it in his today classic book “Out of Control” from 1994].
For some Emergence is just a deterministic mechanism. The set of rules or initial conditions determines the behavior and unpredictability is an emergent property of a system that is predictable on a lower level. This view depreciates other important components of an emergent process[1] such as randomness, interaction and the environment. In addition, a complex system cannot be understood by examining its individual parts[2].
[1] At least when applied to the kind of Emergence present in the swarm of my painting robots.
[2] For this see Dennett’s concept of intentional emergence as the main property of complex systems.
Machine Art
With the rise of computers Digital Art was the product of an artificial “language” used to implement routines, to trigger behaviors and to run algorithms inside machines. The distinction between objective and nonobjective became fuzzy as computers are radically objective but work and produce outputs without any reference to the real world.
The use of computers to make art was initially a subsidiary product of this new language. Artists used computers to generate processes and images that relate mainly to the inner architecture of the machines. Through rules, protocols and algorithms computers create processes and images as the result of complex calculations. The process is so clearly an abstraction of reality that its outputs are usually referred as virtual.
In this new context art appeared as the result of experimenting with automated algorithms, often described as Computer or Digital Art. In this kind of art, the opposition to the objective or the figurative is not relevant. This art is abstract even when it depicts well recognized objects or figures[3].[
[3] Like is the case of Harold Cohen´s work.
With the advent of machines as thinking devices able to perform tasks based on their own discretion, a particular form of intelligence coined artificial intelligence was developed, and “computer art” took a new turn, in which complexity is ubiquitous.
Complexity is not a cumulative capacity, but it gives rise to the possibility to simulate bio-inspired and emergent artificial systems. The computer originates what is now known as artificial life, that is, organisms that live inside machines or explore the real world in the form of autonomous robots.
From this new field of exploration was born a new kind of art which is fundamentally autonomous, self-organized and emergent.
Stigmergy
Based on ants and other social insect’s studies, we have tried to reproduce artificially a similar emergent behavior in a robot swarm. These insects communicate among themselves through chemical messages, the pheromones, with which they produce certain patterns of collective behavior, like follow a trail, clean up, repair and build nests, defense and attack or territory conquest. Despite pheromone not being the exclusive way of communication among these insects — the touch of antennas in ants or the dance in bees are equally important —, pheromonal language produces complex cognition via bottom-up procedures. Pheromone expression is dynamic, making use of increments and decrements, positive and negative feedbacks. Messages are amplified when pheromone is reinforced, and lose “meaning” when breeze disperses it. It is also an indirect form of communication, coined stigmergy by Grassé, from the Greek stigma/sign and ergon/action. Between the individual who places the message and the one who is stimulated by it, there is no proximity or direct relation.
Following these principles, we have replaced pheromone by color. The marks left by one robot triggers a pictorial action on other robots. Through this apparent random mechanism abstract paintings are generated, which reveal well defined shapes and patterns. These robots create abstract paintings that seem at first sight just random doodles, but after some reflexive observation color clusters and patterns become patent. Through the recognition of the color marks left by a robot, the others react to it reinforcing certain color spots. The process is thus everything but arbitrary.
Conclusion
Painting robots were created to paint. Not a specific painting but their own paintings. The essential of their creations stems from the machine own interpretation of the world and not from its human description. No previous plan, fitness, aesthetic taste or artistic model is induced. These robots are machines dedicated to their art.
Such an endeavor addresses some of the most critical ideas on art, robotics and artificial intelligence. Today we understand intelligence as a basic feedback mechanism. If a system, any system, is able to respond to a certain stimulus in a way that it changes itself or its environment we can say that some sort of intelligence is present. ‘Sheer’ intelligence is therefore something that doesn’t need to refer to any kind of purpose, target or quantification. It may plainly be an interactive mechanism of any kind, with no other objective than to process information and to react in accordance to available output capabilities.
Hence and although the starting point was bioinspiration, in particular modeling social insect’s emergent behavior, the idea was to construct machines able to generate a new kind of art with a minimum of fitness constraints, optimization parameters or real-life simulation. It is the simple mechanism of feedback, emergence and stigmergy that is at work here.
These artistic robots are singular beings, with a particular form of intelligence and a kind of creativity of their own. They do art as other species build nests, change habitats or create social affiliations. But since we, humans, are for the time being the only pensive observers, the relation between machine art and human aesthetics principles is here the central issue. Many people appreciate these robot paintings, probably because we humans seem to gladly embrace fractal and chaotic structures. But, more than shapes and colors, what some of us really value in this idea, and its associated process, is the fact that it questions some of our most strong cultural convictions. Actually, it was supposed art to be an exclusive matter of mankind. In this sense, the robot paintings are a provocative conceptual art that problematizes the boundaries of art as we know it.
[Parts of this text was written with Henrique Garcia Pereira]
References
Beckers, R., Holland, O.E., Deneubourg, J.L.(1994) From local to global tasks: stigmergy and collective robotics, Artificial Life IV, Ed. R. Brooks, MIT
Bonabeau, E., Dorigo, M., Theraulaz, G. (1999) Swarm Intelligence, Oxford University Press
Brooks, R. A. (2002) Flesh and machines: how robots will change us, Pantheon Books
DeLanda M (2011) Philosophy and Simulation: The Emergence of Synthetic Reason, Continuum
Dennett, D (2009) Inside art and science, LxXL
Grassé, P. P. (1959) La réconstruction du nid et les coordinations inter-individuelles chez Bellicositermes Natalienses et cubitermes sp. La théorie de la stigmergie: Essai d’interpretation des termites constructeurs, Ins. Soc., 6, p. 41-48
Johnson, S (2001) Emergence: The Connected Lives of Ants, Brains, Cities, and Software, Scribner
Kelly, K (1994) Out of Control: The New Biology of Machines, Social Systems, and the Economic World, Basic Books
Langton, C. (1987) Proceedings of Artificial Life, Adison-Wesley
Moura, L. and Pereira, H.G. (2004) Symbiotic Art, Institut d’Art Contemporain, Collection Écrits d’artistes
Shanken, E. (2001) Art in information age: Technology and conceptual art, in Invisible College: Reconsidering “Conceptual Art”, Ed. Michael Corris, Cambridge UP